

|
|
bras industriel de robot de commande numérique par ordinateur d'axe du bras ABB IRB4400 6 de robot de peinture avec le traqueur linéaire et le traqueur de couverture et linéaire robotique

| Version de robot | Portée (m) | Charge utile (kilogrammes) | ||
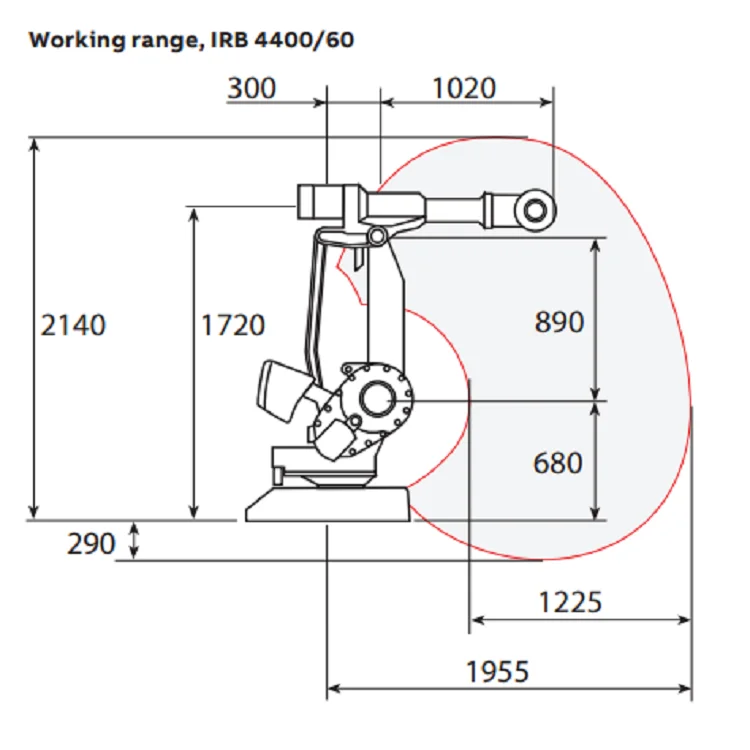
| IRB 4400-60/1.96 | 1,96 | 60 | ||
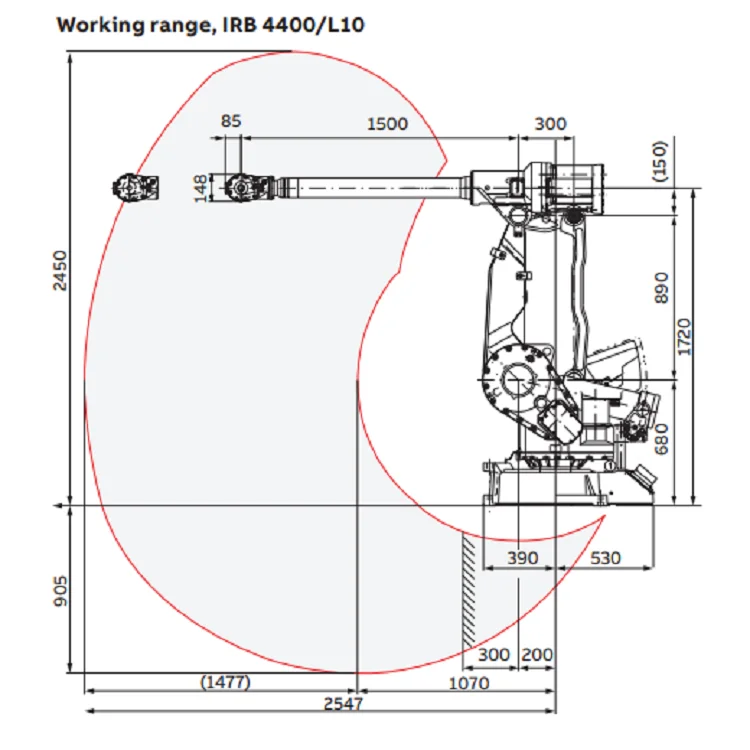
| IRB 4400L-10/2.53 | 2,53 | 10 | ||
| Charge supplémentaire | ||||
| sur l'axe 2 | 35 kilogrammes | |||
| sur l'axe 3 | 15 kilogrammes | |||
| sur l'axe 4 | 0-5 kilogrammes | |||
| Nombre de haches | 6 | |||
| Protection | IP standard 54 de version, IP 67 du plus 2 de fonderie et vapeur à haute pression lavable | |||
| Support | Plancher | |||
| Contrôleur | Cabinet IRC5 simple | |||
| Approvisionnement intégré de signal | 23 signaux et bras de 10 puissances dessus | |||
| Alimentation en air intégrée | Barre du maximum 8 sur le bras | |||
| Version de robot | Répétabilité RP (millimètres) de position | Répétabilité droite (millimètre) de chemin * : |
| IRB 4400-60/1.96 | 0,06 | 0,09 |
| IRB 4400L-10/2.53 | 0,05 | 0,16 |
![]()
|
|
bras industriel de robot de commande numérique par ordinateur d'axe du bras ABB IRB4400 6 de robot de peinture avec le traqueur linéaire et le traqueur de couverture et linéaire robotique
| Version de robot | Portée (m) | Charge utile (kilogrammes) | ||
| IRB 4400-60/1.96 | 1,96 | 60 | ||
| IRB 4400L-10/2.53 | 2,53 | 10 | ||
| Charge supplémentaire | ||||
| sur l'axe 2 | 35 kilogrammes | |||
| sur l'axe 3 | 15 kilogrammes | |||
| sur l'axe 4 | 0-5 kilogrammes | |||
| Nombre de haches | 6 | |||
| Protection | IP standard 54 de version, IP 67 du plus 2 de fonderie et vapeur à haute pression lavable | |||
| Support | Plancher | |||
| Contrôleur | Cabinet IRC5 simple | |||
| Approvisionnement intégré de signal | 23 signaux et bras de 10 puissances dessus | |||
| Alimentation en air intégrée | Barre du maximum 8 sur le bras | |||
| Version de robot | Répétabilité RP (millimètres) de position | Répétabilité droite (millimètre) de chemin * : |
| IRB 4400-60/1.96 | 0,06 | 0,09 |
| IRB 4400L-10/2.53 | 0,05 | 0,16 |
![]()

