

|
|
Robot de commande numérique par ordinateur du bras IRB4600 de robot d'ABB avec la pince électrique pour le travail de transfert avec la machine à cintrer

| Version de robot | Répétabilité RP (millimètres) de position | Répétabilité droite (millimètre) de chemin * |
| IRB 4600 60/2.05 | 0,06 | 0,46 |
| IRB 4600 45/2.05 | 0,05 | 0,13 |
| IRB 4600 40/2.55 | 0,06 | 0,28 |
| IRB 4600 20/2.50 | 0,05 | 0,17 |
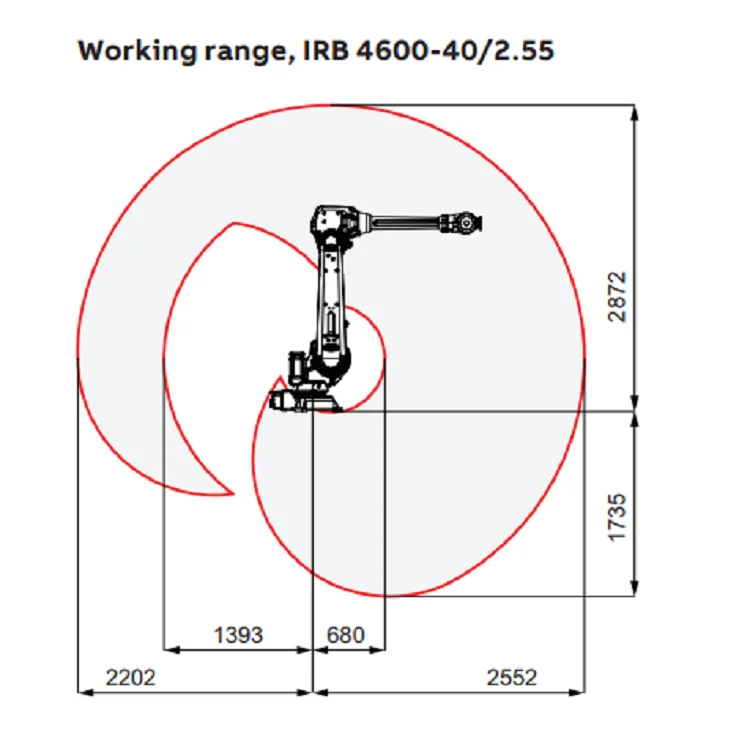
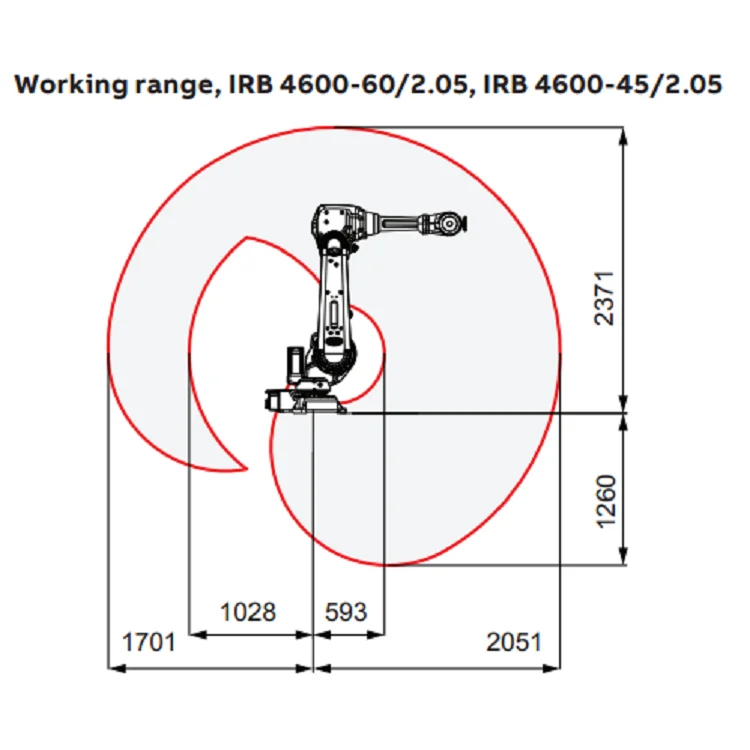
| Versions de robot | Portée (m) | Charge utile (kilogrammes) | Armload (kilogrammes) | |
| IRB 4600 60/2.05 | 2,05 | 60 | 20 | |
| IRB 4600 45/2.05 | 2,05 | 45 | 20 | |
| IRB 4600 40/2.55 | 2,55 | 40 | 20 | |
| IRB 4600 20/2.50 | 2,51 | 20 | 11 | |
| Nombre de haches | 6+3 externes (jusqu'à 36 avec MultiMove) | |||
| Protection | IP67 standard, comme fonderie d'option plus 2 | |||
| Support | Plancher, étagère, inversée ou inclinée | |||
| Contrôleur | Armoire IRC5 simple, | |||
|
|
Robot de commande numérique par ordinateur du bras IRB4600 de robot d'ABB avec la pince électrique pour le travail de transfert avec la machine à cintrer
| Version de robot | Répétabilité RP (millimètres) de position | Répétabilité droite (millimètre) de chemin * |
| IRB 4600 60/2.05 | 0,06 | 0,46 |
| IRB 4600 45/2.05 | 0,05 | 0,13 |
| IRB 4600 40/2.55 | 0,06 | 0,28 |
| IRB 4600 20/2.50 | 0,05 | 0,17 |
| Versions de robot | Portée (m) | Charge utile (kilogrammes) | Armload (kilogrammes) | |
| IRB 4600 60/2.05 | 2,05 | 60 | 20 | |
| IRB 4600 45/2.05 | 2,05 | 45 | 20 | |
| IRB 4600 40/2.55 | 2,55 | 40 | 20 | |
| IRB 4600 20/2.50 | 2,51 | 20 | 11 | |
| Nombre de haches | 6+3 externes (jusqu'à 36 avec MultiMove) | |||
| Protection | IP67 standard, comme fonderie d'option plus 2 | |||
| Support | Plancher, étagère, inversée ou inclinée | |||
| Contrôleur | Armoire IRC5 simple, | |||


