

|
| Nombre De Pièces: | 1 |
| Prix: | US $3500.00 - 4880.00/ Set |
| Emballage Standard: | Boîte en carton/Caisse en bois |
| Période De Livraison: | 6~8 semaines |
| Méthode De Paiement: | T/T |
| Capacité D'approvisionnement: | 500 sets par an |
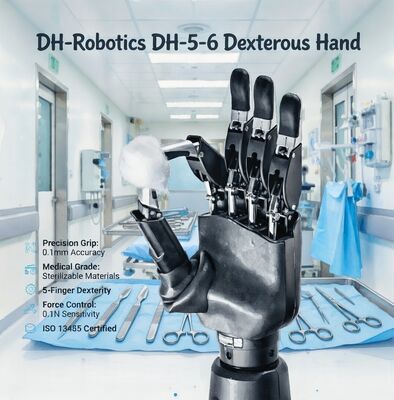
Le DH-5-6 de DH-Robotics est une main robotique dextre à 5 doigts avec 6 degrés de liberté actifs, conçue pour les robots humanoïdes, les applications collaboratives et la recherche. Il utilise une actionnement par câbles avec des micro-actionneurs linéaires et prend en charge la perception de la force/du toucher pour une préhension sûre et précise. Le produit met l'accent sur la rentabilité tout en offrant une dextérité semblable à celle de l'homme.
| Paramètre | Spécification |
|---|---|
| Doigts | 5 doigts (humanoïde) |
| DOF actifs | 6 |
| Total des articulations | 12 |
| Actionnement | Actionnement par câbles (micro-actionneurs linéaires) |
| Détection | Capteurs de force / tactiles |
| Mode de contrôle | Hybride position-force |
| Communication | CAN / RS485 / EtherCAT |
| Poids | Environ 400–550 g |
| Force de préhension (par doigt) | 5–15 N typique |
Veuillez nous envoyer :
|
|
| Nombre De Pièces: | 1 |
| Prix: | US $3500.00 - 4880.00/ Set |
| Emballage Standard: | Boîte en carton/Caisse en bois |
| Période De Livraison: | 6~8 semaines |
| Méthode De Paiement: | T/T |
| Capacité D'approvisionnement: | 500 sets par an |
Le DH-5-6 de DH-Robotics est une main robotique dextre à 5 doigts avec 6 degrés de liberté actifs, conçue pour les robots humanoïdes, les applications collaboratives et la recherche. Il utilise une actionnement par câbles avec des micro-actionneurs linéaires et prend en charge la perception de la force/du toucher pour une préhension sûre et précise. Le produit met l'accent sur la rentabilité tout en offrant une dextérité semblable à celle de l'homme.
| Paramètre | Spécification |
|---|---|
| Doigts | 5 doigts (humanoïde) |
| DOF actifs | 6 |
| Total des articulations | 12 |
| Actionnement | Actionnement par câbles (micro-actionneurs linéaires) |
| Détection | Capteurs de force / tactiles |
| Mode de contrôle | Hybride position-force |
| Communication | CAN / RS485 / EtherCAT |
| Poids | Environ 400–550 g |
| Force de préhension (par doigt) | 5–15 N typique |
Veuillez nous envoyer :

