|
|
| Nombre De Pièces: | 1 |
| Prix: | 1500$ |
| Emballage Standard: | 169 cm (H), 75 cm (l) , 30 cm (L) |
| Période De Livraison: | 1 mois |
| Capacité D'approvisionnement: | 99 unités |
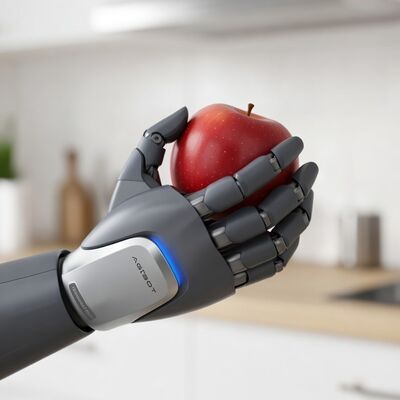
La nouvelle main robotique humaine à cinq doigts AGIBOT OmniHand Pro 2025 est un effecteur d'extrémité robotique avancé conçu pour imiter le mouvement de la main humaine avec précision et flexibilité.Cette main robotique à cinq doigts permet un mouvement coordonné des doigts., une saisie de haute précision et une rétroaction de force intelligente pour des tâches de manipulation complexes.
OmniHand Pro 2025 est adapté pour les robots humanoïdes, les plateformes de recherche sur les robots de service et les bras robotiques industriels qui nécessitent un mouvement naturel de la main,manipulation adaptative des objets et interaction humaine-robot en toute sécurité.
Chaque doigt peut se déplacer indépendamment pour effectuer une saisie et une manipulation naturelles similaires au mouvement de la main humaine.
Des capteurs de force et tactiles intégrés permettent un contrôle de la prise adaptatif basé sur la forme, le poids et la fragilité de l'objet.
Un contrôle fluide et précis de plusieurs articulations permet une manipulation délicate et des tâches de manipulation complexes.
Des algorithmes de contrôle numériques avancés permettent un mouvement réactif et un réglage en temps réel pour un fonctionnement stable.
Prend en charge l'intégration avec des robots humanoïdes, des bras robotiques et des robots de service par le biais d'interfaces de communication et de montage standard.
Des options de configuration flexibles permettent une personnalisation pour des tâches spécifiques ou des systèmes robotiques.
| Nom de l'article | Spécification |
|---|---|
| Type de produit | Main robot humaine à cinq doigts |
| Des degrés de liberté | Doigts indépendants à articulations multiples |
| Méthode de contrôle | Contrôle numérique intelligent |
| Détection | Force et rétroaction tactile |
| Compatibilité | Robots humanoïdes et bras robotiques |
| La communication | Interfaces standard pour la robotique |
| Intégration | Montage et commande modulaires |
| Énergie | Système externe alimenté |
| Environnement de fonctionnement | Espaces industriels et de recherche à l'intérieur |
Les spécifications peuvent varier selon la configuration.
L'Agibot OmniHand Pro 2025 combine une conception mécanique humaine avec une détection et un contrôle intelligents pour prendre en charge la prochaine génération de robots humanoïdes et de plates-formes robotiques avancées.Il offre une manipulation de haute performance et une flexibilité accrue pour les applications futures.
C'est une main robot humanoïde à cinq doigts conçue pour une manipulation avancée et un mouvement humain en robotique.
Il supporte l'intégration avec des robots humanoïdes, des bras robotiques et des robots de service en utilisant des interfaces standard.
Il peut saisir, manipuler, manipuler des objets et effectuer des tâches délicates qui nécessitent une précision et un contrôle adaptatif.
Des capteurs tactiles et de force intégrés permettent un contrôle adaptatif basé sur la rétroaction du contact.
Oui, il est largement utilisé dans les laboratoires de recherche en robotique d'IA et les environnements pédagogiques pour des études de manipulation avancées.
Sa conception modulaire permet une personnalisation pour différentes applications et exigences du système.
|
|
| Nombre De Pièces: | 1 |
| Prix: | 1500$ |
| Emballage Standard: | 169 cm (H), 75 cm (l) , 30 cm (L) |
| Période De Livraison: | 1 mois |
| Capacité D'approvisionnement: | 99 unités |
La nouvelle main robotique humaine à cinq doigts AGIBOT OmniHand Pro 2025 est un effecteur d'extrémité robotique avancé conçu pour imiter le mouvement de la main humaine avec précision et flexibilité.Cette main robotique à cinq doigts permet un mouvement coordonné des doigts., une saisie de haute précision et une rétroaction de force intelligente pour des tâches de manipulation complexes.
OmniHand Pro 2025 est adapté pour les robots humanoïdes, les plateformes de recherche sur les robots de service et les bras robotiques industriels qui nécessitent un mouvement naturel de la main,manipulation adaptative des objets et interaction humaine-robot en toute sécurité.
Chaque doigt peut se déplacer indépendamment pour effectuer une saisie et une manipulation naturelles similaires au mouvement de la main humaine.
Des capteurs de force et tactiles intégrés permettent un contrôle de la prise adaptatif basé sur la forme, le poids et la fragilité de l'objet.
Un contrôle fluide et précis de plusieurs articulations permet une manipulation délicate et des tâches de manipulation complexes.
Des algorithmes de contrôle numériques avancés permettent un mouvement réactif et un réglage en temps réel pour un fonctionnement stable.
Prend en charge l'intégration avec des robots humanoïdes, des bras robotiques et des robots de service par le biais d'interfaces de communication et de montage standard.
Des options de configuration flexibles permettent une personnalisation pour des tâches spécifiques ou des systèmes robotiques.
| Nom de l'article | Spécification |
|---|---|
| Type de produit | Main robot humaine à cinq doigts |
| Des degrés de liberté | Doigts indépendants à articulations multiples |
| Méthode de contrôle | Contrôle numérique intelligent |
| Détection | Force et rétroaction tactile |
| Compatibilité | Robots humanoïdes et bras robotiques |
| La communication | Interfaces standard pour la robotique |
| Intégration | Montage et commande modulaires |
| Énergie | Système externe alimenté |
| Environnement de fonctionnement | Espaces industriels et de recherche à l'intérieur |
Les spécifications peuvent varier selon la configuration.
L'Agibot OmniHand Pro 2025 combine une conception mécanique humaine avec une détection et un contrôle intelligents pour prendre en charge la prochaine génération de robots humanoïdes et de plates-formes robotiques avancées.Il offre une manipulation de haute performance et une flexibilité accrue pour les applications futures.
C'est une main robot humanoïde à cinq doigts conçue pour une manipulation avancée et un mouvement humain en robotique.
Il supporte l'intégration avec des robots humanoïdes, des bras robotiques et des robots de service en utilisant des interfaces standard.
Il peut saisir, manipuler, manipuler des objets et effectuer des tâches délicates qui nécessitent une précision et un contrôle adaptatif.
Des capteurs tactiles et de force intégrés permettent un contrôle adaptatif basé sur la rétroaction du contact.
Oui, il est largement utilisé dans les laboratoires de recherche en robotique d'IA et les environnements pédagogiques pour des études de manipulation avancées.
Sa conception modulaire permet une personnalisation pour différentes applications et exigences du système.